 產(chǎn)品分類
產(chǎn)品分類
光流模塊
光流模塊
相關(guān)文章 : 0篇
瀏覽 : 次
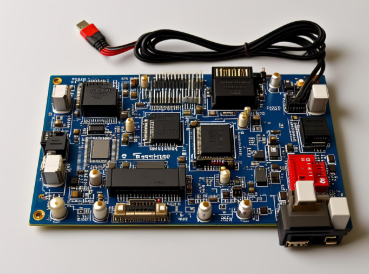
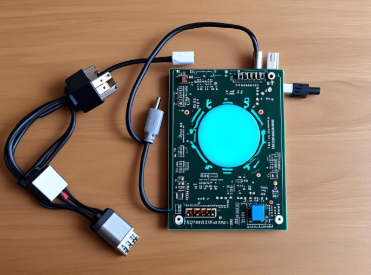
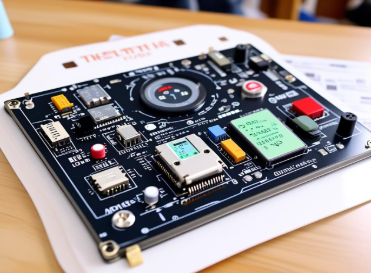
光流模塊在無(wú) GPS 環(huán)境下,課實(shí)時(shí)檢測(cè)飛機(jī)水平移動(dòng)距離,實(shí)現(xiàn)對(duì)四軸無(wú)人機(jī)長(zhǎng)時(shí)間的穩(wěn)定懸停。圖1顯示的是湖南優(yōu)象LC-302光流模塊的功能框圖,光流攝像頭拍攝無(wú)人機(jī)垂直向下的畫面,輸入光流主板,主板通過(guò)光流懸停智能算法進(jìn)行光流計(jì)算,從而獲取無(wú)人機(jī)位移信息,并轉(zhuǎn)化為懸停控制指令,懸停控制指令通過(guò) UART 輸出給飛控,以便控制飛機(jī)水平移動(dòng)距離,達(dá)到懸停的目的。 ———————————————— 版權(quán)聲明:本文為CSDN博主「weixin_45035303」的原創(chuàng)文章,遵循CC 4.0 BY-SA版權(quán)協(xié)議,轉(zhuǎn)載請(qǐng)附上原文出處鏈接及本聲明。 原文鏈接:https://blog.csdn.net/weixin_45035303/article/details/90034566
推薦產(chǎn)品





列表欄目














 2012- 2022 拍明芯城ICZOOM.com 版權(quán)所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權(quán)所有 客服熱線:400-693-8369 (9:00-18:00)